
GPS Sistema de Posicionamiento Global
 El Sistema de Posicionamiento Global (GPS) es un sistema de geolocalización que operan a nivel mundial plenamente operativo y accesible al público.
El Sistema de Posicionamiento Global (GPS) es un sistema de geolocalización que operan a nivel mundial plenamente operativo y accesible al público.
Este sistema ha sido teorizado por el físico D. Fanelli1 y establecido originalmente por el Departamento de Defensa de los Estados Unidos. Pronto se hizo evidente que las señales transmitidas por los satélites podrían ser recibidos y explotados libremente, y por lo tanto un receptor podrían conocer su posición sobre la superficie de la Tierra con una precisión sin precedentes, en el instante en que era con circuitos electrónicos y el software necesarios para el tratamiento de la información recibida. Una persona con este receptor puede localizar y mover en la tierra, en el mar, en el aire o en el espacio, en las proximidades de la Tierra.
GPS ha tenido mucho éxito en el sector civil y creado un enorme desarrollo comercial en muchas áreas de transporte marítimo, por carretera, la ubicación del camión, senderismo, etc. Del mismo modo, la comunidad científica ha sido capaz de desarrollar y explotar las propiedades de las señales transmitidas para muchas aplicaciones: la geodesia, la transferencia de tiempo entre los relojes atómicos, los estudios atmosféricos, etc.
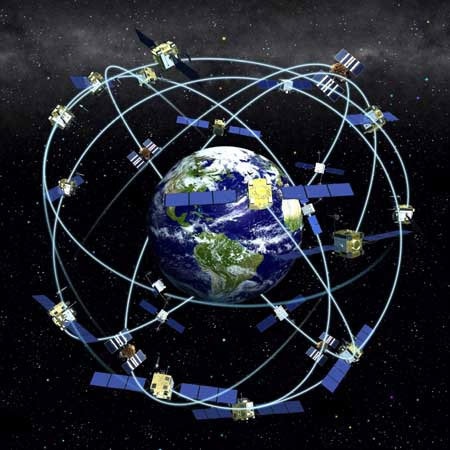
GPS utiliza el datum WGS84, a la que se refieren las coordenadas calculadas a través del sistema. El primer satélite experimental fue lanzado en 1978, pero la constelación de 24 satélites que no estuvo en funcionamiento hasta 1995.
El GPS tiene al menos 24 satélites que orbitan a 20.200 kilómetros altitud. Los satélites transmiten continuamente en dos frecuencias L1 (1 575,42 MHz) y L2 (1 227,60 MHz) modulada en fase (BPSK) con uno o más códigos de pseudo-aleatorios, de fecha precisamente gracias a su reloj atómico, y un mensaje de navegación. Este mensaje transmite a 50 bit / s, en particular, incluye efemérides para calcular la posición de los satélites, así como información sobre su reloj interno. Los códigos son un código C / A tasa de 1,023 Mbit / s y 1 ms de época y un código P («precisa») tasa de 10 23 Mbit / s y duración de 1 semana. La primera es de libre acceso, el segundo está restringido a usuarios autorizados, ya que se suele cifrar: se llama receptores Y-código vendidos en el sector civil utilizando el código C / A. Algunos receptores para aplicaciones de alta precisión como la geodesia, implementar técnicas para usar el código P Y a pesar de su código de encriptación.
Por lo tanto, un receptor GPS que recibe las señales de al menos cuatro satélites con múltiples relojes atómicos puede, al calcular el tiempo de propagación de estas señales entre el satélite y conocer su distancia de este último y, por la trilateración , localizar con precisión en tres dimensiones de cualquier elemento colocado en satélites GPS2 visibilidad, con una precisión de 3 a 50 metros para el sistema estándar. GPS se utiliza para localizar vehículos, barcos, aviones, misiles y hasta satélites en órbita terrestre baja.
En cuanto a la exactitud, es común tener una posición horizontal a 10 metros. El GPS es un sistema desarrollado por el ejército estadounidense, la disponibilidad selectiva fue planeado: algunos informes, especialmente aquellos en los satélites de reloj puede ser deliberadamente degradado y privar a los receptores que no tienen códigos correspondientes para la máxima precisión . Durante algunos años, la población civil y tenía acceso a sólo una baja precisión (unos 100 m). 01 de mayo 2000, el presidente Bill Clinton anunció que estaba finalizando este degradación voluntaria de servicio.
Algunos sistemas GPS diseñados para usos muy específicos pueden proporcionar una ubicación dentro de unos pocos milímetros. GPS diferencial (DGPS), corrige la posición obtenida por el GPS convencional mediante los datos enviados por referencia estación de tierra localizada con precisión. Otros sistemas autónomos, que refinan su ubicación en ocho horas de exposición alcanzan resultados equivalentes.
En algunos casos, sólo tres satélites pueden ser suficientes. La ubicación de altitud (eje Z) no es inmediatamente correcta como longitud y latitud (eje X y Y) siguen siendo buenas. Así que podemos estar satisfechos con tres satélites cuando se opera por encima de una superficie «plana» (Mar Océano). Este tipo de excepción es especialmente útil para el posicionamiento de las máquinas (como los aviones) volando que no se puede confiar en el GPS solo, demasiado vago para darles su altitud. Pero hay sin embargo un modelo de geoide global llamada «Tierra Gravedad Modelo 1996» o EGM964 asociado con el WGS 84 que, desde el WGS 84, de altitudes determinadas reportados al nivel medio del mar con una precisión de alrededor de 1 metro . Receptores avanzada GPS incluyen este modelo para proporcionar altitudes más acorde con la realidad.
Mediante GPS funciona el cálculo del distancia entre un receptor GPS satélites de Varios. La Información Necesaria para calcular los satélites de posición están transmitiendo regularmente al receptor que PUEDE, A Través del Conocimiento de la DISTANCIA entre Información de contacto de los satélites.
La Tecnología informática ha Mejorado el funcionamiento técnico del GPS del uso de Varios conceptos matemáticos gráficos como si utilizan principalmente en los sistemas de datos básicos. De Hecho, Como al menos varios algoritmos Gps-alquiler, el algoritmo de Floyd-Warshall de, el algoritmo de Dijkstra, o algoritmo Amplia de ruta es utilizado para garantizar el correcto funcionamiento del sistema. Contrarresta en relación con la identificación de ruta corta, más la utilizada por GPS en el algoritmo de Dijkstra.
Cálculo de la posición GPS
Conocer las posiciones de los satélites para transmitir señales de una hora, y los pseudo-distancias medidas (posiblemente con ajustes de varios factores, principalmente relacionados con la propagación de la onda), el equipo del receptor es capaz de resolver un sistema de ecuaciones cuyas incógnitas son la posición de cuatro receptor (tres incógnitas) y el desplazamiento de su reloj en comparación con el tiempo GPS. Este cálculo es posible, por tanto, que tenemos medidas en cuatro satélites; un cálculo en modo degradado es posible con sólo tres satélites si uno conoce la altitud; cuando más de cuatro satélites son visibles (que es muy a menudo el caso), el sistema de ecuaciones a resolver es superfluo: la precisión del cálculo se ha mejorado, y los errores se puede estimar la posición y el tiempo.
La precisión de la posición obtenida depende, en igualdad de circunstancias, la geometría del sistema si los satélites están en una observación de baja cono apertura angular, la precisión será peor que si se distribuyen de manera uniforme. Los efectos de la geometría en el sistema de medición de precisión se describen mediante un parámetro: DOP (por «dilución de precisión»): HDOP se refiere a la precisión horizontal la precisión TDOP con el tiempo, la VDOP precisión de la altitud. La precisión esperada es mejor como DOP es pequeño.
Posibles errores GPS
La mayoría de los receptores son capaces de perfeccionar sus cálculos utilizando más de cuatro satélites (que hace que los resultados de cálculos más precisos), mientras que la eliminación de las fuentes parece poco fiables o demasiado cerca uno del otro para proporcionar medición correcta, como se ha dicho.
Sin embargo, el GPS no es utilizable en todas las situaciones, la señal de los satélites NAVSTAR son bastante bajos y diferentes factores pueden afectar a la precisión de la localización: el cruce de las capas de la atmósfera entre otros con la presencia de gotas agua, hojas simples de los árboles pueden absorber la totalidad o parte de la señal, y el «efecto cañón» particularmente sensible en las gargantas, las montañas (de ahí su nombre) o urbana (fenómeno de cañón urbano)). Consiste en la ocultación de un alivio por satélite (por ejemplo, un edificio); o peor aún, en un eco de la señal contra una superficie que no impedirá la ubicación, pero proporcionará una falsa ubicación: el problema de las señales multitrayecto GPS.
Troposfera y la ionosfera correcciones
En ausencia de obstáculos, sigue siendo factores estresantes importantes requieren resultados de los cálculos de corrección. El primero es el cruce de las capas bajas de la atmósfera, la troposfera. La presencia de humedad y los cambios de presión en la troposfera altera el índice de refracción y por lo tanto la velocidad y la dirección de propagación de la señal de radio. El término hidrostática es ahora bien conocido, las perturbaciones debidas a la necesidad de humedad que debe corregirse, siempre que sea precisa el perfil de vapor de agua de acuerdo a la altitud, una información difícil coleccionable, excepto en medios extremadamente caros como lidar, que dan resultados sólo en parches. Receptores actuales incorporan un modelo de corrección.
El segundo factor preocupante es la ionosfera. Esta capa ionizada por la radiación solar cambia la velocidad de propagación de la señal. La mayoría de los receptores incorporan un algoritmo de corrección, pero en periodos de alta actividad solar, esta corrección no es lo suficientemente precisa. Para corregir este efecto más precisamente, algunos receptores de doble frecuencia utilizan el hecho de que tanto L1 y L2 frecuencias de la señal GPS no se ve afectada de la misma manera y por lo tanto volver a calcular la perturbación real.