
PLC controlador lógico programable
 Un controlador lógico programable, o PLC, es un dispositivo electrónico programable para el control de procesos industriales mediante un tratamiento secuencial. Se envía órdenes a los pre-actuadores (PO parte operativa o actuador lateral) de datos de entrada (sensores) (control lateral PC parte o sensor) e instrucciones de un programa informático.
Un controlador lógico programable, o PLC, es un dispositivo electrónico programable para el control de procesos industriales mediante un tratamiento secuencial. Se envía órdenes a los pre-actuadores (PO parte operativa o actuador lateral) de datos de entrada (sensores) (control lateral PC parte o sensor) e instrucciones de un programa informático.
Cuando PLC realiza una función de seguridad, entonces se llama la seguridad o APS PLC.
Llamado controlador lógico programable, PLC (Controlador Lógico Programable en Inglés, PLC) un tipo particular de equipo, robusto y sensible, con entradas y salidas físicas, que se utiliza para automatizar procesos como el control de la maquinaria en una línea de montaje en una fábrica, o los sistemas de manipulación automáticos de control. Cuando los sistemas automatizados mayores emplean cientos o miles de relés y árboles de levas, un PLC bastante simple. Automatización llama programadores de estos autómatas programables lógicos.
El API se estructura en torno a una unidad de cálculo o procesador (en la Unidad Central de Procesamiento, CPU), una dieta con fuentes de energía alternativas (CA) o continua (CC), y las necesidades de los módulos dependientes aplicación, tales como:
Mapas de entrada – salida (en Inglés de input – output, I / O) digital a las señales de 2-estatales o analógico para señales de continua evolución
Los módulos de entrada para conectar sensores, pulsadores, etc.
Los módulos de salida para actuadores de conexión, luces, válvulas, etc.
Los módulos de comunicación de obedecer diversos Modbus, Modbus Plus, Profibus, Interbus, DeviceNet, LonWorks, Ethernet, FIPIO, FIPWAY, RS232, RS-485, AS-i, CANopen, charlar con otros controladores, E / salida remota, supervisiones y otras interfaces hombre-máquina (HMI, Human Machine Interface en Inglés, HMI), etc.
Módulos de oficios específicos como contaje rápido, con un peso, etc.
Los módulos de interfaz para el control de movimiento, llamados módulos de movimiento, tales como arrancadores suaves, variadores de velocidad, control de movimiento.
Módulos locales de diálogo hombre-máquina, como un panel (táctil o teclas), una terminal de mantenimiento conectado al controlador a través de un propietario industrial red o no, y publicar mensajes o representación del proceso.
Otros controles más antiguo, consistía en un simple dispositivo cuya dirección de entrada consistió en una concatenación de datos de entrada (sensores, reloj) y el estado anterior. Mucho menos caro, que se prestaron sin embargo un rápido aumento en el número de estados. Permanecieron ampliamente utilizados para la automatización simple de estilo Antiblockiersystem (ABS) o semáforos en las intersecciones.
Las API se caracterizan con respecto a las computadoras
De robustez: diseñado para ser capaz de trabajar en un ambiente hostil, utilizan circuitos endurecidos están diseñados para soportar vibraciones, talleres temperatura, etc.
Por su reactividad con la información proporcionada por los sensores (dispositivos anticolisión, varias alarmas);
Su capacidad de servicio (aunque las computadoras industriales también alcanza un alto grado de fiabilidad). Los módulos se pueden cambiar muy fácilmente y reiniciar el API es muy rápido.
La falta de Human Machine Interface (HMI) de pie para ver la acción y el funcionamiento del programa en la parte dispositiva hacen los controladores a menudo están conectados a un panel de operador, una interfaz gráfica (pantalla o pantalla táctil) o PC. En este último caso, hablamos de supervisión. El PC también puede ser utilizado solo mediante la agrupación de funciones de la API y la supervisión, a través del uso de un SoftPLC.
En la automatización industrial, existe se habla mucho de las máquinas remotas. En este caso, se trata a través de Internet para ver o modificar de forma remota datos o programar autómatas gestión de instalaciones controladas: calderas de centrales eléctricas, plantas de tratamiento de agua, etc. Esto se hace a menudo asociada a través de software de módem routers garantizar una conexión segura (VPN). En general, si el PLC y PC coexisten en un taller, la función de la API más cerca de los procesos físicos y apoyar a los problemas de seguridad que intervienen en lugar de monitoreo de PC y de informes externos. El PC puede entonces establecer las mejores APIs instrucciones, que dan órdenes detalladas, manejar emergencias, e informe sobre el estado del proceso.
Programas de la API son tratados en un ciclo fijo:
Diagnóstico (autocomprobación)
La adquisición de todos los insumos (copiar en una memoria de imagen)
La ejecución del programa
Actualizar salidas.
El tiempo de un ciclo de PLC varía dependiendo del tamaño del programa, la complejidad computacional, el número de potencia de entrada / salida de la API, y las necesidades de proceso impulsado. Se extiende de unas pocas decenas de milisegundos y está protegido, si por ejemplo, cuando el algoritmo indefinidamente ejecutar el mismo bucle de programa.
Lectura de control del sensor y actuador se lleva a cabo mediante el escaneo, la gestión de las interrupciones que pueden ser víctima de incidente.
Diferentes lenguajes de programación
Hay diferentes lenguajes de programación definidos por la norma IEC 61131-3:
IL (lista de instrucciones), el lenguaje de lista es muy cercano al lenguaje ensamblador de trabajo más cercano al procesador utilizando la unidad lógica aritmética, sus registros y acumuladores
ST (texto estructurado) Este lenguaje estructurado se asemeja a los lenguajes de alto nivel utilizados para ordenadores
LD (Ladder), el lenguaje de contactos similar a los diagramas eléctricos y puede convertirse rápidamente una aplicación antigua hecha de relés electromecánicos en un programa. Este enfoque utiliza un enfoque de programación visual para el problema a largo apreciado en la industria, sino que se basa en una lógica menos adaptados, pero todavía se utiliza. También se conoce en Ladder idioma o General Perfil lenguaje para describir esto.
Cajas funcionales (FBD) FUP se presenta en forma de gráfico: secuencia de bloques, conectable a las operaciones, simples o sofisticados realizar.
En la programación de un robot, también es posible optar por programa en SFC, derivado de Grafcet. Cada acción primaria se asocia con un programa escrito en IL, ST, LD o FBD. El Grafcet, es una herramienta gráfica para definir la automatización secuencial, en un número finito de pasos, separados por condiciones de transición. Utiliza una representación gráfica clara, lo que permite, por ejemplo, el director de mostrar al cliente cómo él entiende las especificaciones. Universal, independiente del lenguaje (en un principio) la realización práctica, se puede por secuenciadores programar PLC o un ordenador. Además, permite: priorizar secuencias; coordinar en un ciclo de secuencias interrelacionadas que tienen lugar simultáneamente; aplicar las condiciones de validez asegurar el ciclo de control; finalmente, para explotar el método, el método de gestión segura GEMMA de modos de operación y parada.
En el caso del software de los controladores lógicos programables (SoftPLC), también hay diferentes lenguajes de programación no definidos por la norma IEC 61131-3 que amplían considerablemente las posibilidades de configuración, por ejemplo: C / C ++: Proview encendido; Pascal: PLC Visual. Gracias a su flexibilidad, el software se ejecuta en la fabricación y fresado tren canal de automóviles.
Sin embargo, la popularidad de estas lenguas no debe ocultar sus debilidades en los procesos de seguridad.
Ejemplos PLC
Un PLC puede manejar uno o más ascensores.
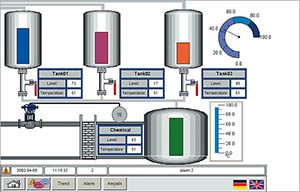
Una API con un programa simple puede mantener un nivel de fluido en un depósito entre dos niveles (mini y maxi) abriendo y cerrando una válvula. Un programa ligeramente más complejo podría implicar una medición de nivel (como entrada) y un controlador de flujo (resultado) permitiendo que el agua fluya a una velocidad controlada. Una automatización industrial típico podría pedir varios tanques en un proceso como el tratamiento de aguas residuales. Cada tanque se puede observar para una variedad de condiciones tales como: ni demasiado ni demasiado llena o vacía, que tiene un pH dentro de un cierto rango, la temperatura adecuada.
Una API también puede conducir un reactor y en consecuencia controlar entradas reactivos, catalizadores o disolventes, lanzamientos de productos, calentamiento o refrigeración, etc.
Un PLC puede controlar un coche automático.
Ventajas y desventajas PLC
Los elementos que lo componen son particularmente robusta (sin mecánica de rotación para el enfriamiento y almacenamiento de datos, materiales reforzados) lo que les permite trabajar en ambientes agresivos (polvo circundante, interferencias electromagnéticas, soportes de vibraciones, cambios de temperatura)
Tienen circuitos electrónicos optimizados para la interfaz con las entradas y salidas del sistema de físicas, envíos y recepción de la señal son muy rápidos con el medio ambiente. Con la ejecución secuencial más cíclica sin modificar la memoria, pueden garantizar un tiempo mínimo de funcionamiento, respetando un determinismo temporal y lógico, lo que garantiza la fuerza de trabajo en tiempo real (el sistema reacciona necesariamente dentro de la fecha límite).
A cambio, ellos son más caras que las soluciones de TI convencionales microcontroladores basados ??por ejemplo, pero son en la actualidad las únicas plataformas de ejecución consideradas como fiables en entornos industriales (con ordenadores industriales). El precio es particularmente dependiente de la cantidad de entradas / salidas necesarias, memoria, que es estar disponible para llevar a cabo el programa, la presencia o ausencia de módulos específicos. Además requieren el dominio de lenguajes específicos se ajustan a la norma IEC 61131-3 que toman su forma lógica de ejecución interna del PLC. Estas lenguas, sin embargo, parecen mucho más accesible al usuario y visual de los lenguajes de programación tradicionales.
PLC de seguridad
Más allá de la aplicación tradicional, PLC puede tener características denominadas de «seguridad». Permiten que él o para tener una garantía, incluso después de la destrucción de un elemento. Es para asegurar la operación que va a generar acciones cada vez más restrictivas en caso de destrucción de un artículo, lo que garantiza la seguridad de personas y bienes.
Estas características pueden incluir:
Entradas: Los sensores se controlan continuamente, y que entren estados lógicos sólo seguras. Trituración el cable creando un tribunal de circuito que podría generar un pie «1» no está permitido.
Salidas: un control de un accionador o actuador en sí puede ser controlada, o redundantes para asegurar su puesta en servicio o su fallo, incluso en caso de fallo de un elemento.
La propia unidad de control: puede ser redundante para asegurar su funcionamiento.
Software PLC
Una alternativa al controlador de hardware programable consta de un controlador de software, por lo que no hay materiales relacionados con este tipo, pero la reutilización de los mismos conceptos y lenguas del mundo de la automatización. Algunos idiomas adicionales, más información y electricista, por lo tanto menos accesibles orientadas, también pueden incluirse.
A veces llamado SoftPLC. Para asegurar un tratamiento a tiempo, la plataforma de hardware utilizada para ejecutar el motor de automatización debe ejecutarse en un sistema operativo de tiempo real.
También puede haber de simuladores de PLC, pero en este caso es sólo para probar un programa para la prueba, sin necesidad de leer los sensores y actuadores de control verdadero. Este tipo de software puede repente simplemente ejecute en un sistema operativo convencional no en tiempo real.